Производительность системы
Какому уровню соответствует защита системы Zenmuse L2?
В контролируемых лабораторных условиях защита Zenmuse L2 соответствует требованиям класса IP54 в рамках стандарта IEC60529. Чтобы обеспечить соответствие высшему классу защиты:
- Перед установкой проверьте, чтобы все поверхности и внутренние части подвеса были сухими;
- Перед эксплуатацией надежно закрепите подвес к дрону, проверьте, чтобы защитная крышка для карты SD была чистой, свободной от посторонних объектов и надежно закрыта;
- Перед тем, как открыть защитную крышку карты SD, тщательно протрите поверхность дрона.
Уровень защиты будет снижаться в следствие эксплуатации устройства и его износа.
С какими дронами совместима система Zenmuse L2? Какой интерфейс нужно использовать для установки подвеса?
Zenmuse L2 совместим с дронами Matrice 350 RTK и Matrice 300 RTK, а также только с пультом дистанционного управления DJI RC Plus. Перед эксплуатацией обновите прошивку дрона и пульта управления до самой последней версии. Чтобы обеспечить точность картографирования, установите подвес с камерой L2 на один нижний подвес. А также подключите кабель к правому порту USB-C (если смотреть на дрон).
Каково поле обзора (FOV) у LiDAR'a камеры Zenmuse L2?
При повторяющемся сканировании: по горизонтали 70°, по вертикали 3°
При неповторяющемся сканировании: по горизонтали 70°, по вертикали 75°
Каково максимальное расстояние обнаружения для Zenmuse L2?
Дистанция обнаружения:
250 м при коэффициенте отражения 10%, 100 клк
450 м при коэффициенте отражения 50%, 0 клк
Рекомендуемая рабочая высота: 30-150 м
Сколько отражений поддерживает Zenmuse L2?
Zenmuse L2 поддерживает 5 типов отражений: одинарное отражение (сильнейшее эхо), два отражения, три отражения, четыре отражения и пять отражений.
Какова скорость создания облака точек на Zenmuse L2?
При одном отражении: макс. 240000 точек/сек
При многократных отражениях: макс. 1200000 точек/сек
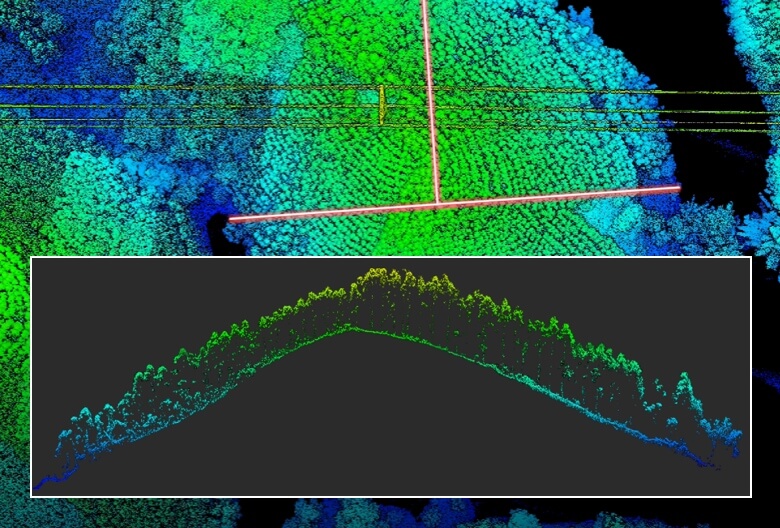
Сколько режимов сканирования есть у Zenmuse L2? Для каких задач их можно использовать?
У Zenmuse L2 есть 2 режима сканирования: неповторяющийся и повторяющийся.
В режиме повторяющегося сканирования LiDAR может выполнять более однородное и точное сканирование, что соответствует требованиям картографии высокой точности.
В режиме неповторяющегося сканирования модуль может выполнять более глубокое проникновение для сбора большего объема структурной информации. Это больше подходит для выполнения инспекций линий электропередач, исследования лесов и других схожих миссий.
Какова точность инерциального модуля у Zenmuse L2?
Точность рыскания: в реальном времени: 0,2°, при пост-обработке: 0,05°
Точность тангажа/крена: в реальном времени 0,05°, при пост-обработке 0,025°
Точность горизонтального позиционирования: 1 см + 1 ppm (RTK FIX)
Точность вертикального позиционирования: 1,5 см + 1 ppm (RTK FIX)
Данные о точности рыскания, а также тангажа/крена получены в следующих лабораторных условиях DJI:
Zenmuse L2 был установлен на дрон Matrice 350 RTK и включен. Для планирования полетного маршрута использовали режим "Зона маршрута" в приложении DJI Pilot 2 (с включенной калибровкой инерциального модуля). Система RTK находилась в положении FIX. Относительная высота была установлена на 150 м, полетная скорость на 15 м/сек, угол тангажа подвеса на -90°, а каждый прямой участок полетного маршрута был меньше 1500 м.
Для каких задач предназначена RGB-камеры системы L2?
При сборе данных облака точек RGB-камера может поставлять для данных цветовую информацию в режиме реального времени, а создаваемые фотографии использовать для реконструкции двухмерных RGB-моделей. Если нет задачи по сбору данных для облака точек, то RGB-камера может фотографировать или снимать видео, а также собирать кадры для создания двух- и трехмерных RGB-моделей.
Каков уровень точности при геопространственном исследовании и картографировании камерой Zenmuse L2?
По горизонтали: 5 см
По вертикали: 4 см
Данные получены в следующих лабораторных условиях DJI: Zenmuse L2 был установлен на дрон Matrice 350 RTK и включен. Для планирования полетного маршрута использовали режим "Зона маршрута" в приложении DJI Pilot 2 (с включенной калибровкой инерциального модуля). Режим повторяющегося сканирования работал с RTK в положении FIX. Относительная высота была установлена на 150 м, полетная скорость на 15 м/сек, угол тангажа подвеса на -90°, а каждый прямой участок полетного маршрута был меньше 1500 м. Объекты в поле были с явными углами, а также использовались наземные контрольные точки, которые соответствовали модели рассеянного отражения. Приложение DJI Terra использовали для пост-обработки с включенной оптимизацией точности облака точек. В схожих условиях режим оптимизации точности облака точек был выключен, точность по вертикали составила 4 см, а по горизонтали - 8 см.
Каковы параметры CMOS-матрицы на RGB-камере Zenmuse L2?
В RGB-камере установлена CMOS-матрица 4/3, размер пикселя составляет 3.3 × 3.3 μm.
Какие обновления были сделаны в системе Zenmuse L2 по сравнению с предшествующими моделями?
Улучшена производительность LiDAR за счет увеличения пятна лазера до примерно 1/5 размера пятна L1 в условиях, когда интересующий объект или область находятся на расстоянии 100 м от LiDAR. Проникающая способность LiDAR была значительно увеличена, а его дальность обнаружения и точность также возросли. Размер пикселя RGB-камеры увеличился на 89% по сравнению с размером пикселя у L1. Точность инерциального модуля повысилась до 0,05° (в реальном времени) и до 0,025° (при пост-обработке). LiDAR поддерживает лазерный дальномер (RNG).
Сбор полевых данных
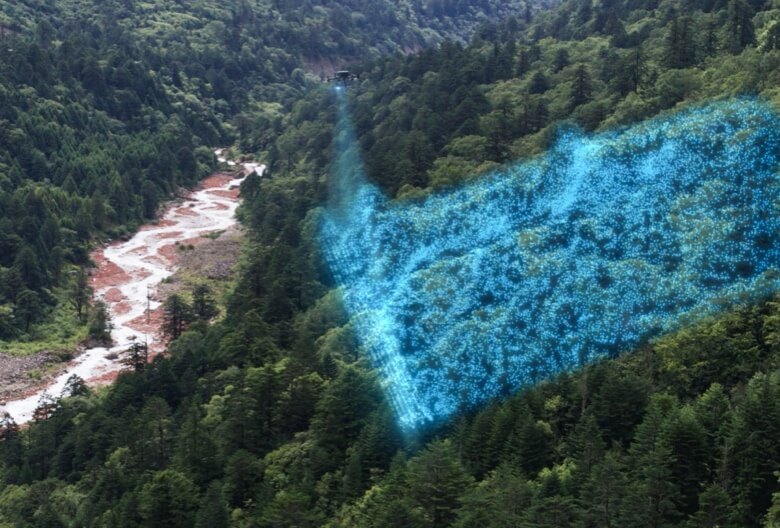
Насколько эффективными стали геопространственные исследования и картография с появлением Zenmuse L2?
Zenmuse L2 способна собрать данные за один полет на площади до 2,5 кв. км.
Данные получены при установке Zenmuse L2 на дрон Matrice 350 RTK при полетной скорости 15 м/сек, высоте полета 150 м, коэффициенте поперечного перекрытия 20%, при включенной калибровке инерциального модуля, выключенном режиме оптимизации и выключенном режиме следования рельефу.
В каких сферах деятельности и для каких задач можно применять Zenmuse L2?
Zenmuse L2 можно широко использовать в самых разных полетных миссиях, включая топографические исследования и картографию, моделирование строительства ЛЭП, управления лесным хозяйством, исследовательских измерениях и многом другом.
Какой тип карт SD нужен для Zenmuse L2?
Карта SD с последовательной скоростью записи в 50 Мб/сек или выше и классом скорости UHS-I Speed Grade 3 или выше; макс. емкость 256 Гб.
Lexar 1066x 64GB U3 A2 V30 microSDXC
Lexar 1066x 128GB U3 A2 V30 microSDXC
Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC
Lexar 1066x 256GB U3 A2 V30 microSDXC
Что означает моделирование Zemuse L2 облака точек в реальном режиме времени? Какие цветовые режимы она поддерживает? Какие операции можно выполнять во время просмотра?
При сборе первоначальных данных для облака точек Zenmuse L2 может генерировать и отображать в реальном времени модель облака точек в приложении DJI Pilot 2 с обработкой в разреженном разрешении. Есть поддержка 4 цветовых режимов, включая коэффициент отражения, высоту, расстояние и RGB. При просмотре моделей в альбоме на пульте дистанционного управления вы можете вращать, перетаскивать, масштабировать, быстро переключать перспективу и рецентрировать обзор.
Какие типы полетных задач может выполнять Zenmuse L2?
В настоящее время L2 поддерживает следующие полетные задачи и режимы: Waypoint Route, Area Route и Linear Route.
Нужно ли готовить систему Zenmuse L2 перед выполнение полетных задач? Нужно выполнять калибровку инерциального модуля Zenmuse L2 во время работы?
Чтобы обеспечить точность собираемых данных, нужно включить функцию калибровки инерциального модуля (Calibrate IMU). Перед выполнением полетного задания включите функцию Calibrate IMU. Перед выполнением полета в ручном режиме вы можете нажать "Calibrate" перед непосредственным выполнением работы, чтобы запустить калибровку вручную. Во время работы каждое новое ручное включение калибровки инерциального модуля делается на основе уведомлений об обратном отсчете.
Какова цель отчета о качестве задач Zenmuse L2?
Отчет о качестве задачи записывает актуальные данные LiDAR, камеры и модуля IMU. Операторы могут судить о достоверности сбора данных на основе состояния каждого модуля.
Какие типы данных можно сохранить на карте SD Zenmuse L2?
CLC (файл калибровки LiDAR)
CLI (файл калибровки IMU LiDAR)
LDR (данные LiDAR)
RTK (данные RTK с основной антенны)
RTL (данные компенсации полюса RTK)
RTS (данные RTK со вспомогательной антенны)
RTB (данные базовой станции RTCM)
IMU (первоначальные данные IMU)
SIG (файл сигнатуры PPK)
LDRT (файл облака точек для просмотра в приложении)
RPT (отчет о качестве облака точек)
RPOS (данные POS-решения в режиме реального времени)
JPG (фотографии, созданные в полете)
Будет ли разница в точности при установке Zenmuse L2 на Matrice 300 RTK и Matrice 350 RTK?
В состоянии FIX RTK разницы в точности между ними нет.
Можно ли оператору просматривать результаты создания облака точек прямо во время выполнения работы?
Да. Операторы могут просматривать текущую коллекцию облаков точек на дисплее облаков точек в режиме реального времени, а также быстро просматривать записанную точку облачной трехмерной модели. После завершения операции вы можете загрузить и просмотреть трехмерную модель облака точек в библиотеке, а также выполнить такие операции, как объединение трехмерных моделей облака точек, созданных за несколько полетов.
Такие операции, как воспроизведение и объединение моделей, необходимо выполнять, только когда коптер и Zenmuse L2 подключены друг к другу.
Соответствует ли просмотр в реальном времени и воспроизведение трехмерной модели облака точек 1 в 1 той модели, которая создается в ходе пост-обработки?
Нет. Это не является соответствием 1 в 1. И просмотр в реальном времени, и воспроизведение трехмерных моделей облаков точек обрабатываются в разреженным разрешением. По количеству облаков точек и точности такой вариант отличается от модели, созданной в DJI Terra.
Пост-обработка
Как можно создать модель высокой точности с помощью данных, собранных Zenmuse L2?
Запустите DJI Terra, чтобы создать новую задачу "Облако точек LiDAR". Следуйте инструкциям, чтобы импортировать данные с SD-карты в DJI Terra и выполните соответствующие настройки. После этого можно приступить к высокоточному моделированию.
Какие форматы результатов можно генерировать с помощью данных Zenmuse L2 в DJI Terra?
Форматы облака точек следующие: PNTS, LAS, PLY, PCD, S3MB. Форматы траектории следующие: sbet.out, sbet.txt
Какие новые функции по обработке облака точек можно использовать вместе с Zenmuse L2 и приложением DJI Terra?
- Классификация наземных точек;
- Цифровая модель рельефа на выходе (DEM);
- Новая функция контроля и проверки точности, которая поддерживает локальную систему координат для того, чтобы обеспечить точных результатов съемки и картографирования;
- Оптимизация толщины облака точек между полетными курсами, чтобы сделать его тоньше и последовательнее;
- Более детальный отчет о качестве облака точек.
Как разобраться в значениях уровня отражения в приложении DJI Terra?
Диапазон отражательной способности составляет от 0 до 255, при этом от 0 до 150 соответствует коэффициенту отражения от 0 до 100% при диффузном отражении Ламберта, а от 151 до 255 соответствует полному коэффициенту отражения.
Значение коэффициента отражения связано с множеством факторов, таких как топография поверхности географического объекта, условия освещения и угол падения, и оно не может строго соответствовать абсолютному коэффициенту отражения.



























")

")









")








")






")
")




")





